- Сообщения
- 70
- Реакции
- 257
- Баллы
- 0
Привет всем!
Не могу держать в себе, очень хочется поделиться процессом создания собственной версии наручного компьютера для подводного охотника. Процесс был длительным, история устройства начиналась вообще с фонарика с глубиномером. Принципиально не публиковал на профильных форумах ничего, пока не были достигнуты первые положительные результаты тестов прототипа.
Имеется огромное желание изготовить прибор, который не только был бы глубиномером с памятью истории погружений, сколько являл собой "комбайн" с дополнительными функциями, полезными подводному охотнику, и не в ущерб качеству. То есть, помимо, собственно, глубиномера и сопутствующих ему функций, имеются такие:
- узконаправленный ультразвуковой дальномер (400кГц) для определения расстояния до дна и др. объектов под водой;
- GPS навигатор
- 3D-компас с отображением ориентации в пространстве
- светодиодный фонарь небольшой мощности
- маслонаполненный корпус с кинетическим интерфейсом для достижения абсолютной герметичности и удобства управления
- встроенный небольшой контейнер (для медикаментов, например)
На текущий момент, необходимо "отполировать" работу ультразвукового дальномера и GPS.
Вообще, из-за сонара пришлось использовать достаточно быстродействующий микроконтроллер с хорошим встроенным АЦП (STM32F429) и дополнительное оперативное запоминающее устройство. Алгоритм определения расстояния до препятствия использует множественные зондирующие импульсы и их последующее их накопление в буфере для дальнейшей обработки (когерентное интегрирование). В последствие, совместно со встроенным гироскопом это позволит рисовать на дисплее картину дна в объёмном виде.
Далее пойдут фотки процесса с кратким описанием.
Создание и тестирование устройства для проверки пьезоэлемента в качестве дальномера


Спроектировал и напечатал на 3D-принтере вариант корпуса компьютера

Пластиковая модель никак не смогла обеспечить герметичность, поэтому было принято решение сделать корпус алюминиевым. Но не просто из плоского куска металла, а так, чтоб нижняя плоскость была дугообразной, для лучшего контакта с рукой. Появилась мысль выплавлять корпуса нужного профиля для дальнейшей фрезеровки.
Пришлось сделать форму для литья алюминия:
Электроэррозионный станок мне в помощь



В итоге, получились заготовки

Результат обработки заготовки на фрезерном станке

Литьё силиконовых ремешков в предварительно выфрезерованные формы

Сборка первой версии печатной платы компьютера и оценка работы дисплея


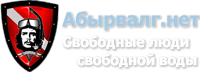
Сборка второй версии платы и её установка в корпус

Проверка прибора в реальных морских условиях



Некоторые проблемы со здоровьем не позволили во время тестирования нырять глубже шести метров. Будем делать барокамеру для тестов не выезжая на море")
Не могу держать в себе, очень хочется поделиться процессом создания собственной версии наручного компьютера для подводного охотника. Процесс был длительным, история устройства начиналась вообще с фонарика с глубиномером. Принципиально не публиковал на профильных форумах ничего, пока не были достигнуты первые положительные результаты тестов прототипа.
Имеется огромное желание изготовить прибор, который не только был бы глубиномером с памятью истории погружений, сколько являл собой "комбайн" с дополнительными функциями, полезными подводному охотнику, и не в ущерб качеству. То есть, помимо, собственно, глубиномера и сопутствующих ему функций, имеются такие:
- узконаправленный ультразвуковой дальномер (400кГц) для определения расстояния до дна и др. объектов под водой;
- GPS навигатор
- 3D-компас с отображением ориентации в пространстве
- светодиодный фонарь небольшой мощности
- маслонаполненный корпус с кинетическим интерфейсом для достижения абсолютной герметичности и удобства управления
- встроенный небольшой контейнер (для медикаментов, например)
На текущий момент, необходимо "отполировать" работу ультразвукового дальномера и GPS.
Вообще, из-за сонара пришлось использовать достаточно быстродействующий микроконтроллер с хорошим встроенным АЦП (STM32F429) и дополнительное оперативное запоминающее устройство. Алгоритм определения расстояния до препятствия использует множественные зондирующие импульсы и их последующее их накопление в буфере для дальнейшей обработки (когерентное интегрирование). В последствие, совместно со встроенным гироскопом это позволит рисовать на дисплее картину дна в объёмном виде.
Далее пойдут фотки процесса с кратким описанием.
Создание и тестирование устройства для проверки пьезоэлемента в качестве дальномера
Спроектировал и напечатал на 3D-принтере вариант корпуса компьютера
Пластиковая модель никак не смогла обеспечить герметичность, поэтому было принято решение сделать корпус алюминиевым. Но не просто из плоского куска металла, а так, чтоб нижняя плоскость была дугообразной, для лучшего контакта с рукой. Появилась мысль выплавлять корпуса нужного профиля для дальнейшей фрезеровки.
Пришлось сделать форму для литья алюминия:
Электроэррозионный станок мне в помощь
В итоге, получились заготовки
Результат обработки заготовки на фрезерном станке
Литьё силиконовых ремешков в предварительно выфрезерованные формы
Сборка первой версии печатной платы компьютера и оценка работы дисплея
Сборка второй версии платы и её установка в корпус
Проверка прибора в реальных морских условиях
Некоторые проблемы со здоровьем не позволили во время тестирования нырять глубже шести метров. Будем делать барокамеру для тестов не выезжая на море




